
Данная статья является продолжением работы, представленной тут: ЭМОС: Часть 1. Введение. Здесь мы поговорим о нюансах реализации системы ЭМОС по ускорению на примере модели, созданной в среде разработки Proteus 8.8 SP1, выполним исследование системы на предмет «жизнеспособности» и устойчивости работы. В конце статьи будет лежать небольшой бонус 🙂
Модель динамической головки
Первым этапом нашей работы является создание в Potrus-е электрической модели динамической головки с учетом акустического оформления типа «закрытый ящик». Модель и некоторые значения номиналов были позаимствованы из [2]:
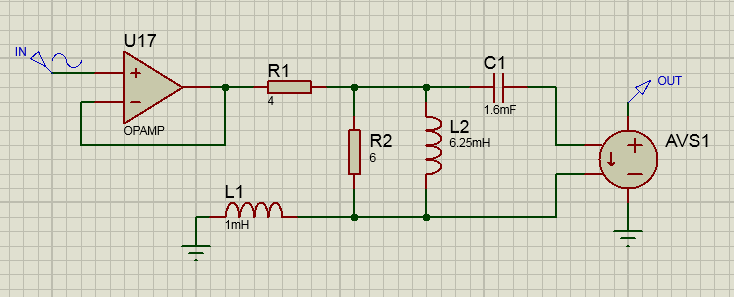
В данной модели была попытка добиться характеристик, схожих с динамиком 25ГДН-3-4.
Более подробно ознакомиться с принципом работы данной электрической модели можно в [2]. AVS1 – преобразователь ток-напряжение с характеристикой -0.5*I(A,B).
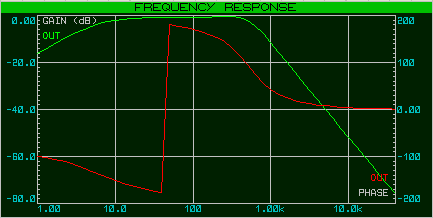
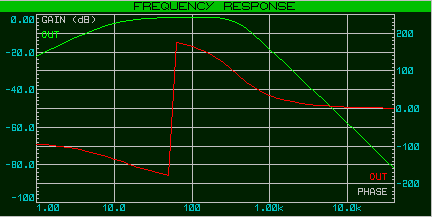
Измерим АЧХ и ФЧХ нашей модели:
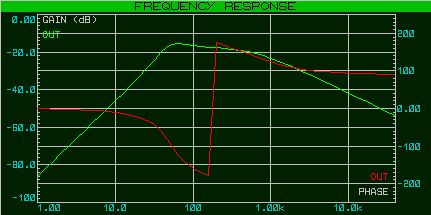
В принципе, нечто похожее на колонку мы получили, по крайней мере теперь есть с чем работать.
Добавляем ЭМОС
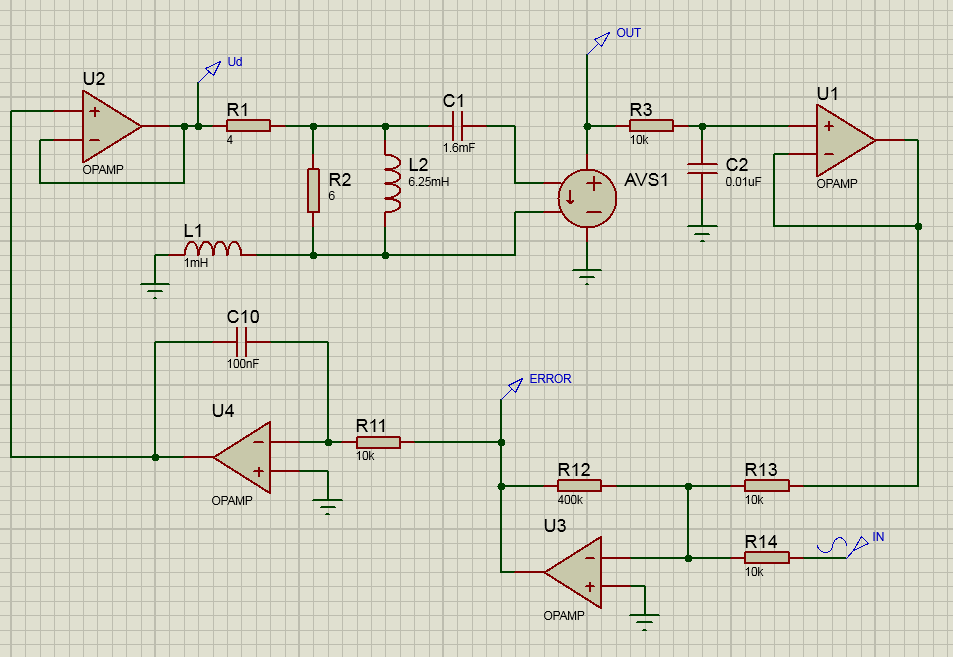
Для начала рассмотрим идеальный случай, при котором в модели динамической головки отсутствуют какие-либо задержки распространения сигнала от звуковой катушки до датчика ускорения, а также сам датчик обладает идеальной характеристикой. Соберем схему, содержащую интегральное звено ПИД-регулятора, как показано в [1]:
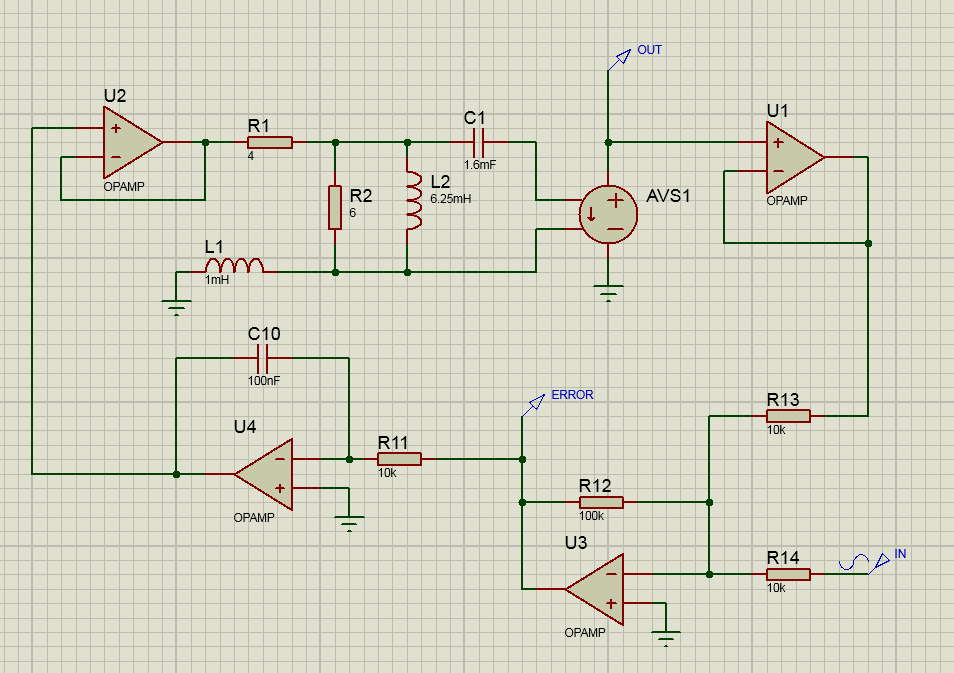
Рассмотрим схему. На элементах U3, R12, R13 и R14 выполнена схема вычисления ошибки регулирования, e(t). Кроме того, с помощью R12 выполняется установка коэффициента усиления Ki. На U4, R11 и C10 собран классический интегратор, на вход которого подается сигнал с выхода усилителя сигнала ошибки. Далее, сигнал с интегратора поступает на вход звукового усилителя U2, после чего идет на нашу модель динамической головки. С выхода модели сигнал ускорения a(t) через буферный ОУ U1 подается на вход вычитателя, где отнимается от звукового сигнала A(t), поданного на вход IN. Так как интегратор U4 разворачивает фазу сигнала на 180 градусов, сигнал a(t) будет так же подан в противофазе на вход вычитателя, поэтому, для нахождения разности между звуковым сигналом и сигналом от датчика ускорения необходимо выполнить операцию суммирования, что и делает схема на элементе U3.
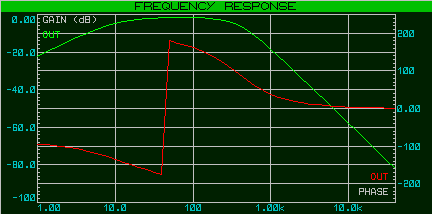
В итоге мы получили простейшую модель системы ЭМОС. Рассмотрим АЧХ данной схемы.
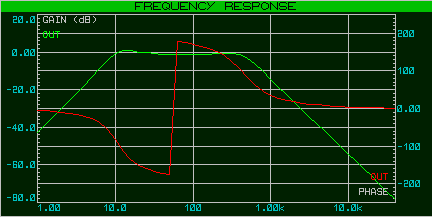
При R12=100 кОм:
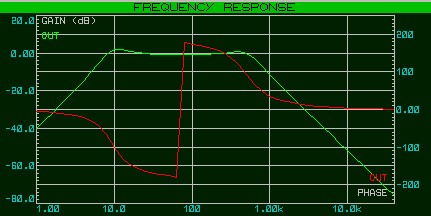
R12=200 кОм:
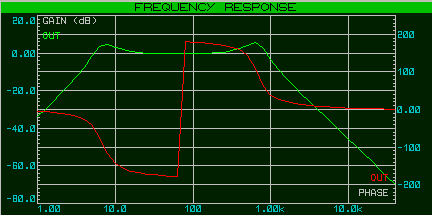
R12=400 кОм:
Из приведенных выше графиков АЧХ делаем вывод, что увеличение значения коэффициента Ki (с помощью R12) приближает АЧХ динамика в области 1..1000 Гц к идеальной. Однако, стоит помнить, что в этом случае амплитуда сигнала на выходе звукового усилителя и амплитуда колебаний диффузора будет крайне большой, что не достижимо в реальных условиях:
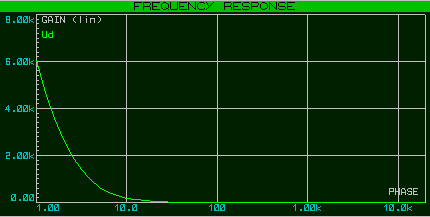
В нашем случае на частоте 1 Гц амплитуда напряжения на звуковой катушке равна 6000 вольт (!!!). Более вменяемые значения напряжений на звуковой катушке получаются начиная с 50 Гц:
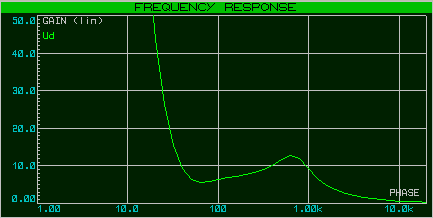
Таким образом получает первое ограничение: нижняя граница воспроизводимых частот для данной модели должна лежать в пределах 50 Гц. Для более «крупных» динамиков эта граница может быть намного ниже.
Добавление задержки распространения сигнала
Первым «улучшением» нашей электрической модели, приближающей её к реальной схеме, будет добавление задержки распространения сигнала от звуковой катушки до датчика ускорения, закрепленном на диффузоре:
Данная задержка выполнена с помощью RC-фильтра на элементах R3 и C2. Давайте рассмотрим, как данная модификация повлияет на АЧХ системы.
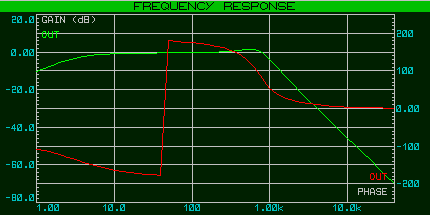
При R12=100 кОм:
R12 = 200 кОм:

При R12 = 400 кОм:

Как и ожидалось, данная задержка дает ограничение на корректную работу обратной связи на высоких частотах, т. е. при достаточно большом коэффициенте Ki система будет самовозбуждаться, в нашем случае это произошло на частоте 630 Гц. Поэтому, при подборе коэффициента Ki нужно соблюдать компромисс между полосой пропускания системы ЭМОС и устойчивостью её работы.
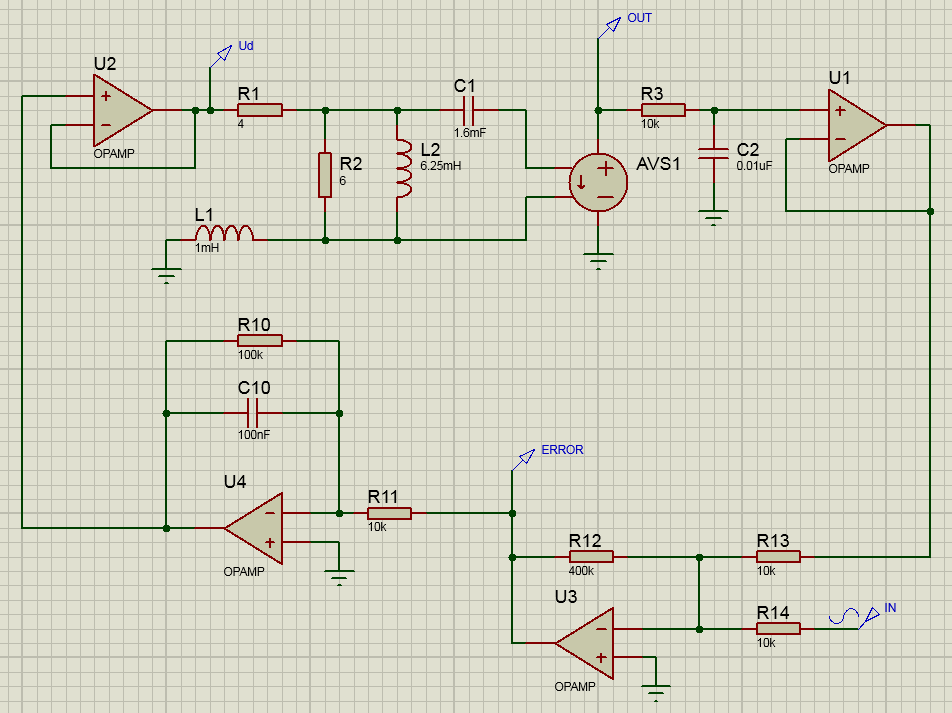
Модификация интегратора
Как было показано в [1], необходимо принять схемотехнические меры, которые будут не допускать накопление в интеграторе системы ЭМОС накопление постоянной составляющей. Иными словами, задача состоит в ограничении работы интегратора в области низких частот. Это можно достичь разными способами, но в данном случае мы пойдем по самому простому пути: параллельно конденсатору C10 поставим резистор R10 на 100 кОм. В итоге схема примет следующий вид:
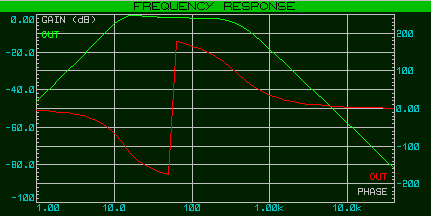
Таким образом, на низких частотах, начиная от 0 Гц, данный интегратор будет работать как обычный инвертирующий усилитель, и с увеличением частоты постепенно «превращаться» в интегратор. Выполним измерение АЧХ системы в данном виде при разных значениях Ki.
R12 = 100 кОм:
R12 = 150 кОм:
R12 = 200 кОм:
R12 = 400 кОм:
Данная модификация интегратора приводит к ограничению полосы пропуская системы ЭМОС снизу частотного диапазона, и при достаточно больших значениях Ki, дополнительно будет возникать самовозбуждение на низких частотах.
Из графиков, приведенных выше, делаем вывод, что для нашей схемы оптимальным значением резистора R12 будет равняться 150 кОм.
Выводы
Из всего вышесказанного делаем вывод, что система, построенная по принципам, описанным в [1], теоретически является жизнеспособной. Особое внимание следует уделить рабочей полосе частот системе ЭМОС, а именно сделать ограничение нижней границы на уровне 50 Гц для предотвращения клиппинга динамика и усилителя на низких частотах. Кроме того, задержка распространения сигнала в петле обратной связи системы управление влечет за собой ограничение верней границы работы динамической головки. Это означает, что датчик ускорения на динамической головке необходимо разместить таким образом, чтобы минимизировать задержку распространения сигнала ускорения от звуковой катушки до датчика. Так же следует рассмотреть вариант использования источника тока, управляемого напряжением (ИТУН) в качестве звукового усилителя для уменьшения влияния индуктивности звуковой катушки, как это показано в [2].
Бонус
Протеус достаточно навороченный софт, и кроме всего прочего он позволяет в качестве испытательного сигнала использовать не только генератор синуса, пилы, меандра и т. д., но и обыкновенный .wav файл! Ну и докучи умеет сохранять сигнал в тот же .wav. Ну и почему бы нам этим не воспользоваться?!
В качестве сигнала возьмем вот эту песню и выкачаем из нее звуковую дорожку:
и прогоним через нашу модель. Вот результат:
Звучанию не удивляйтесь, это только НЧ-составляющая звукового сигнала, в настоящей акустике будет еще СЧ и ВЧ динамик 🙂
Ссылка на скачивание: NIVIRO — The Labyrinth (EMFB edition)
Список литературы
1. ЭМОС: Часть 1. Введение [Электронный ресурс] // DiMoon Electronics. [2021] URL: https://dimoon.ru/akustika/emos-chast-1-vvedenie.html
2. ЭМОС: коротко обо всем [Электронный ресурс] // Мухамедзянов Н. (aka Nota Bene). [2012] URL: http://reanimator-h.narod.ru/faq_emos.htm
Файлы к статье
Проект в ISIS Proteus 8.8: emfb-isis-model.zip